💼 See What I Build | ⚡ Open to Full-Time & Startup Opportunities | 🔧 Let’s Collaborate on Freelance Projects


Autonomous Feature Extraction of Bionic Hand : Computer Vision (Master's Project)
Milestone Achieved: Utilizing the powerful hand detection capabilities of OpenCV, we've successfully integrated real-time hand detection into our robotic system. This achievement marks a significant step forward in creating a natural and intuitive interaction between humans and machines.
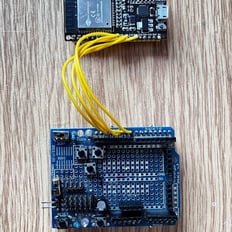
Seamless Control: By establishing a robust serial communication channel between Python and CPP, we've enabled precise control over the robotic hand's movements. This seamless integration allows us to accurately replicate hand gestures detected by our computer vision system, providing a seamless user experience.
AI-Driven Innovation: Looking ahead, we're exploring the potential of AI to further enhance our system. By harnessing machine learning algorithms, we aim to extract valuable features from real-time data streams, allowing us to generate optimized control programs automatically. This AI-driven approach promises to streamline manufacturing processes by adapting to dynamic environments and improving the efficiency of robotic systems. Additionally, in biped robot development, AI will play a crucial role in analyzing vast amounts of human walking data to extract key parameters such as joint angles and walking speed. By leveraging this data, we can create robots that mimic human locomotion with unprecedented accuracy, opening up new possibilities for applications in various industries.